NASA and Autonomous Cars Love This Algorithm
Table of Links
Abstract and I. Introduction
II. Related Works
III. Dead Reckoning using Radar Odometry
IV. Stochastic Cloning Indirect Extended Kalman Filter
V. Experiments
VI. Conclusion and References
\
IV. STOCHASTIC CLONING INDIRECT EXTENDED KALMAN FILTER
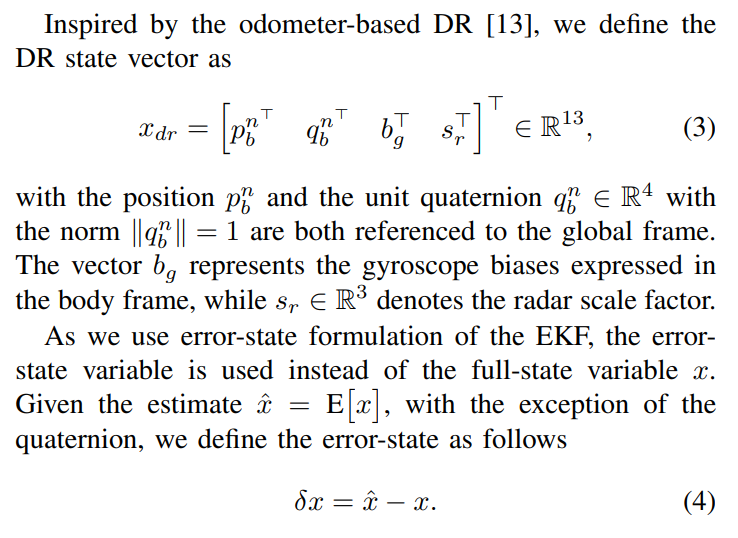
A. State Augmentation
\ 
\ 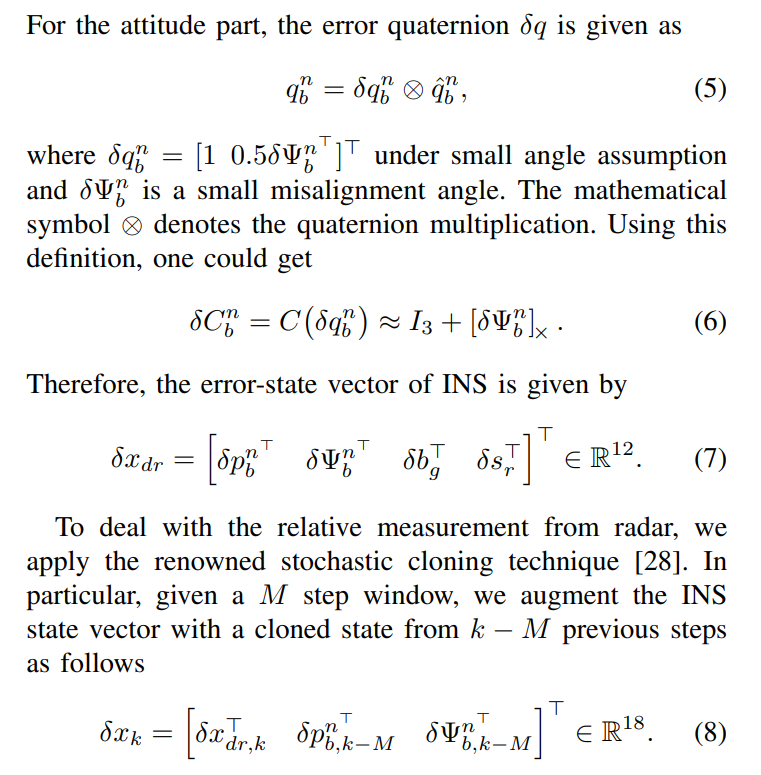
\ B. System Model
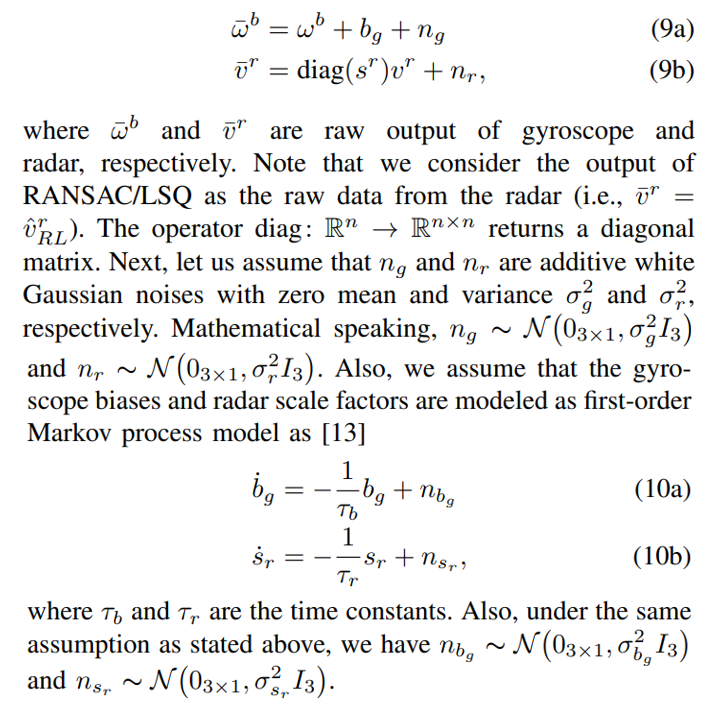
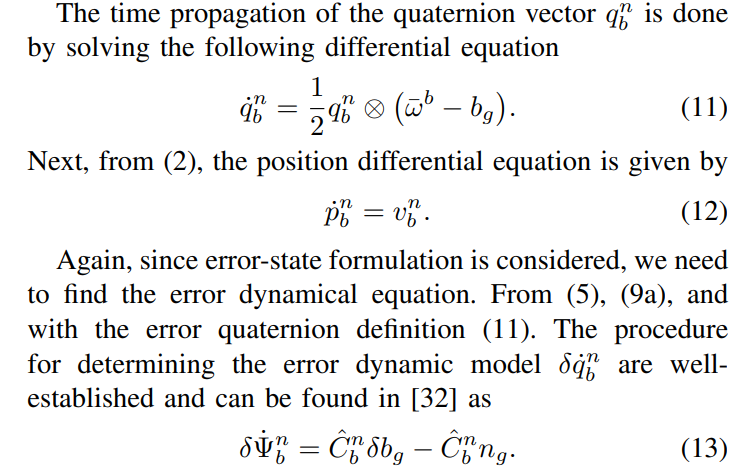
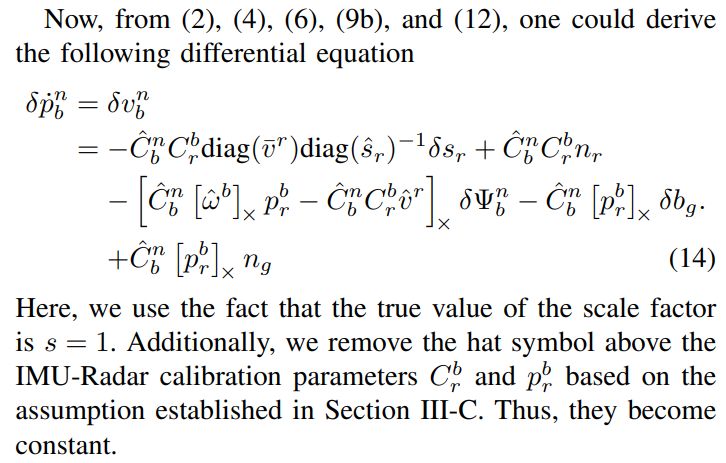
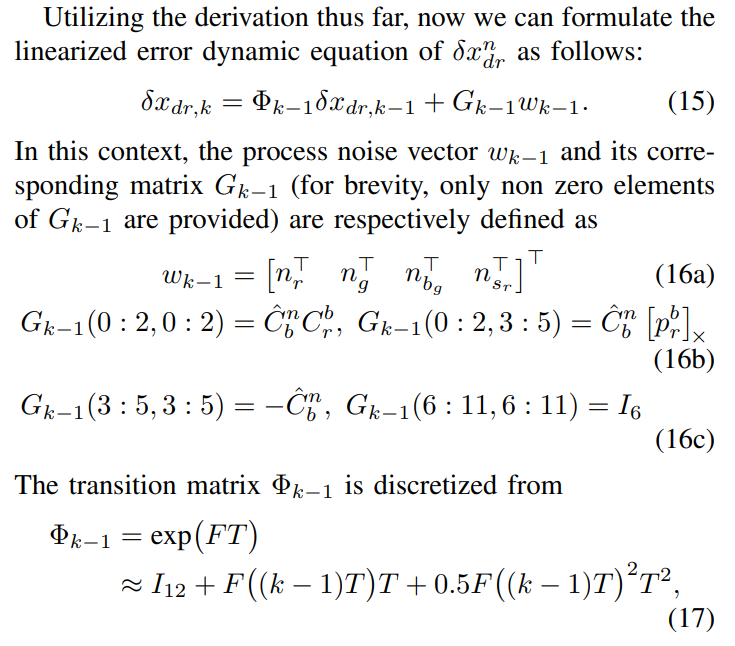
\ We now define the mathematical model of the gyroscope and radar sensors a
\ 
\ 
\ 
\ 
\ 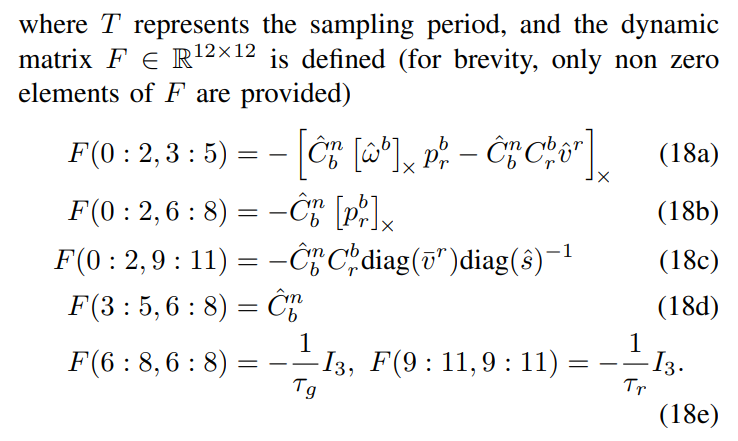
\ The augmented transition matrix is then given by
\ 
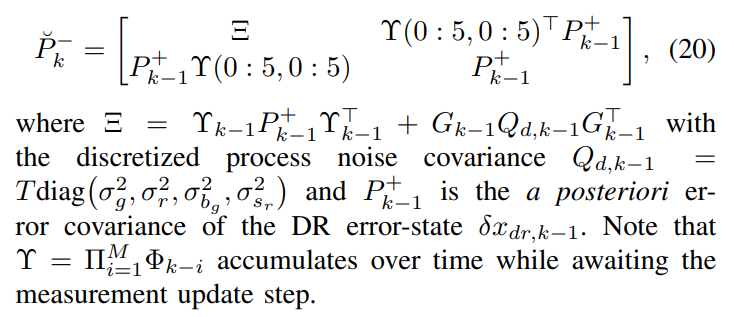
\ As a result, the error covariance of the augmented system is propagated as [28]
\ 
\ C. Measurement Model
\ Model The DeRO system leverages measurement from both radar (distance of the targets) and tilt angles calculated from accelerometers. We shall describe each measurement model in detail
\ 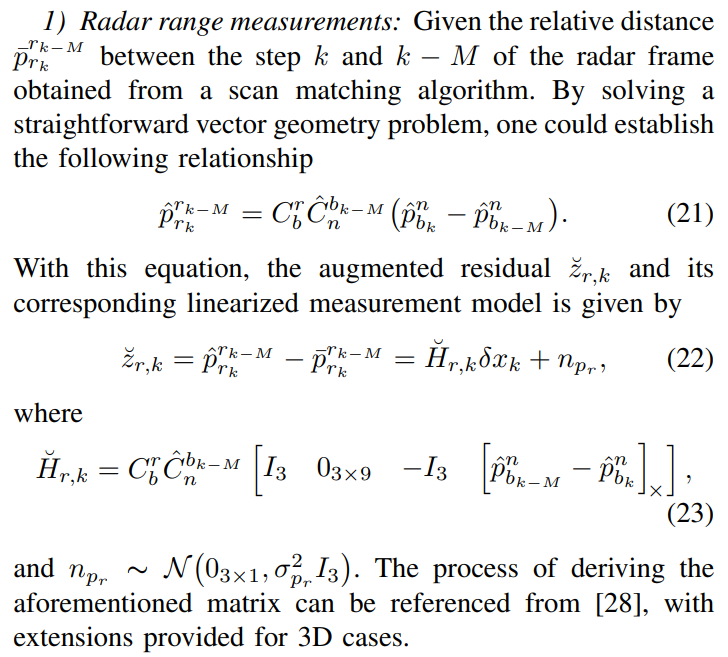
\ D cases. Unlike in [29], where each target’s distance measurement is directly used, we employ the entire scan for matching to determine the distance between frames. This strategy leads to a significant reduction in computation
\ 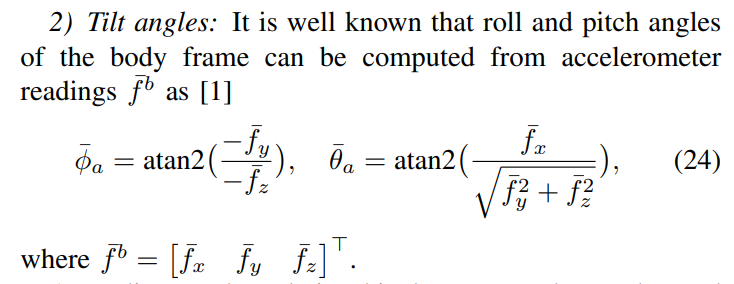
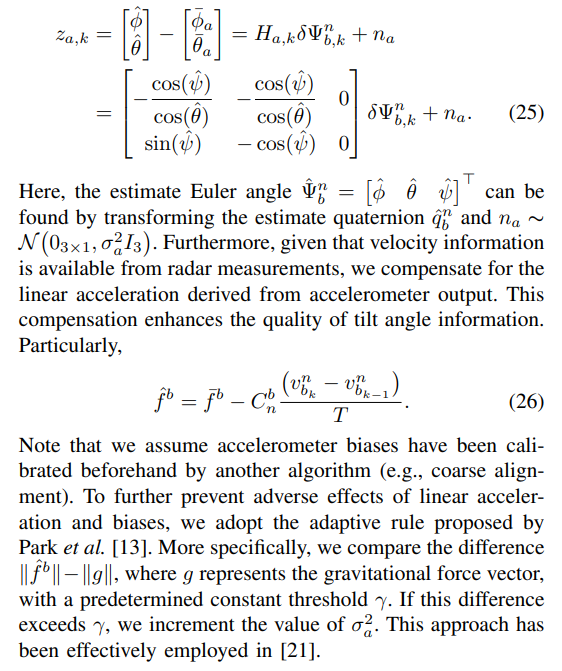
\ According to the relationship between Euler angles and misalignment angles [21], we establish the following linearized measurement model to update the DR estimation
\ 
\ D. Implementation
\ on The detailed step-by-step practical implementation of the DeRO is outlined in Algorithm 1. In our approach, the procedure for each sensor is executed as soon as the corresponding sensor’s data becomes available.
\
:::info Authors:
(1) Hoang Viet Do, Intelligent Navigation and Control Systems Laboratory (iNCSL), School of Intelligent Mechatronics Engineering, and the Department of Convergence Engineering for Intelligent Drone, Sejong University, Seoul 05006, Republic Of Korea ([email protected]);
(2) Yong Hun Kim, Intelligent Navigation and Control Systems Laboratory (iNCSL), School of Intelligent Mechatronics Engineering, and the Department of Convergence Engineering for Intelligent Drone, Sejong University, Seoul 05006, Republic Of Korea ([email protected]);
(3) Joo Han Lee, Intelligent Navigation and Control Systems Laboratory (iNCSL), School of Intelligent Mechatronics Engineering, and the Department of Convergence Engineering for Intelligent Drone, Sejong University, Seoul 05006, Republic Of Korea ([email protected]);
(4) Min Ho Lee, Intelligent Navigation and Control Systems Laboratory (iNCSL), School of Intelligent Mechatronics Engineering, and the Department of Convergence Engineering for Intelligent Drone, Sejong University, Seoul 05006, Republic Of Korea ([email protected])r;
(5) Jin Woo Song, Intelligent Navigation and Control Systems Laboratory (iNCSL), School of Intelligent Mechatronics Engineering, and the Department of Convergence Engineering for Intelligent Drone, Sejong University, Seoul 05006, Republic Of Korea ([email protected]).
:::
:::info This paper is available on arxiv under ATTRIBUTION-NONCOMMERCIAL-NODERIVS 4.0 INTERNATIONAL license.
:::
\


추천 콘텐츠

Moody’s Assigns First-Ever Rating to Bitcoin-Backed Municipal Bond in Historic Crypto Finance Move

Justice Department has 'gone off the rails' for Trump's 'pretzel logic': analysis